





研究紹介
Research Projects
装着型ロボット(アクティブギプス)の開発上肢機能障がい者を対象とした残存筋力を手先に伝達する装着型ロボット(アクティブギプス)の開発を行っています.日常生活支援のほか,機能回復効果も期待されます.また,片麻痺患者の歩行支援へと対象を拡大し,リハビリや日常生活を支援する肩・膝・足首に装着するロボットの開発も行っています. |
 |
| アクティブギブスによる 車いす操作支援 |
リアルタイムでの画像診断を可能とする装具の開発ウェアラブル超音波装置と3Dプリント装具を組み合わせることにより,運動障害を有する患者に対して,リアルタイムでの運動器の動態を考慮し,運動器の機能回復を実現する装具の開発を行っています. |
 |
| エコーによる 運動器解析 |
健康長寿社会を実現する福祉ロボット・介護支援システムの開発障がい者の自立を支援するための福祉ロボット・介護システムの開発を行っています.転倒防止を実現するロボット義足や機能回復を実現する移乗支援ロボット,認知症患者の転倒を防止する見守り支援機器の開発を行っています. |
 |
| 転倒を防止する ロボット義足の開発 |
車いす搭載型ロボットアームシステムの開発上肢機能障がい者を対象として,物体の把持などの日常動作を支援する電動車いす搭載型ロボットアームの開発を行っています.また,筋ジストロフィー患者を対象に,拇指の微小な動きから障害物回避などの走行を実現する制御システムの開発も行っています. |
 |
| 電動車いす搭載用 ロボットアームの開発 |
心身のリラックス効果を目的とした支援システムの開発身体障害を持つ方や高齢者の方を対象として,運動感覚の改善や心身のリラックス効果を目的とした支援システムの開発を行っています.スポーツ,ギター演奏,描画などの活動を支援しています. |
|
 |
 |
| ギター演奏支援装置「響楽」の開発 |
描画支援ロボットによる 創作活動の支援 |
人間協調型作業支援ロボット開発医療・福祉・産業分野において人とロボットが共存して作業を行えるロボットを開発しています.手ぶれ補正技術を援用した人間-ロボット協調型外科手術支援システムなどの開発を行っています. |
|
 |
 |
| 外科手術支援ロボットの開発 | 液体ハンドリングロボットの開発 |
附属病院との連携による高度医療システムの開発医学部付属病院との医工連携体制の下,機械学習を用いたせん妄予測モデルの作成や呼吸リハビリ効果測定システムといった最先端医療システムの開発を行っています. |
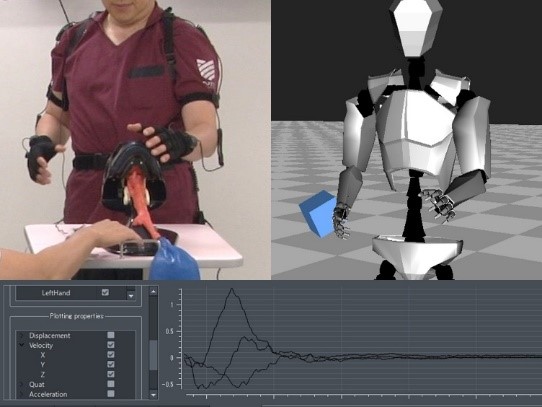 |
| モ―ションキャプチャーによる 手技解析 |
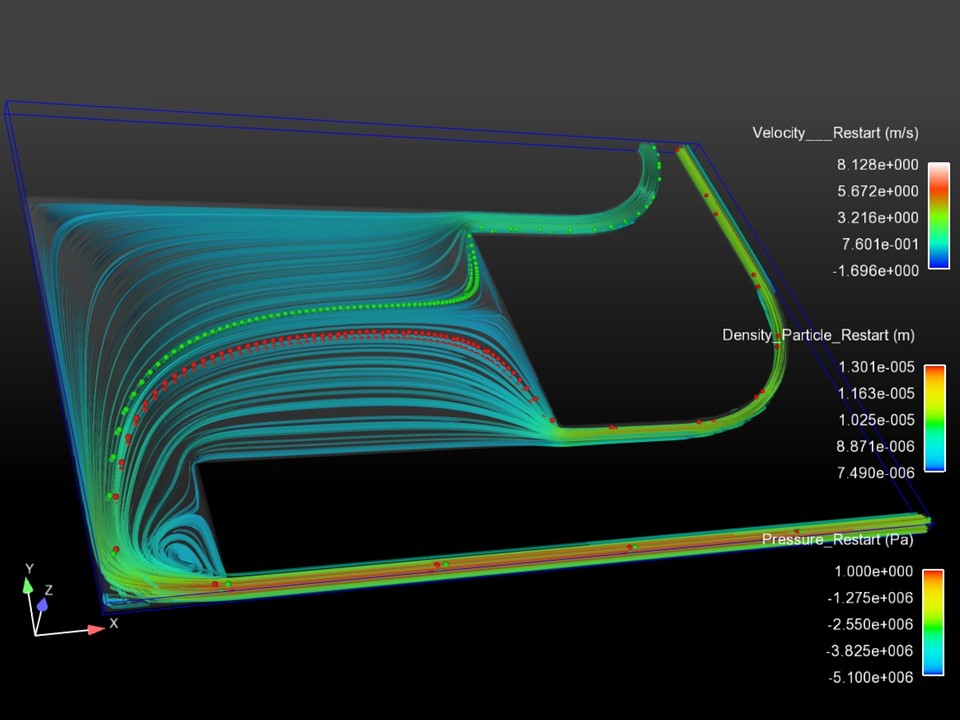
鋳造プロセスの自動化・最適化数値流体力学(CFD)を援用した最適化システムの開発を行うとともに,製品の高品質・高機能・高耐久性を実現する鋳造プロセスおよび鋳型方案形状の最適化に関する研究を行っています. |
 |
| ダイカスト方案の形状最適化 |
医療デバイス用バイオシステムの開発動脈硬化症や感染症等の早期治癒を実現するドラッグデリバリーシステムの開発や,マイクロフルイディックデバイスを用いたセルソータといった最先端医療システムの開発を行っています. |
 |
| がん細胞を対象とした マイクロフルイディックの解析 |
製品品質と生産性を向上させる工程制御システムの開発医薬品製造プロセスや熱処理プロセスにおける熱流体現象の解析を行い,プロセス制御システムの開発を行っています.大型プラントの脱炭素技術の開発や生産システムのDX技術の開発も行っています. |
 |
| 熱処理システムの開発 |
次世代パーソナルモビリティの開発超高齢社会において,農作業や家庭での軽作業を一人で行うことができる不整地対応型パーソナルモビリティの開発や,車両姿勢に基づく走行安定制御システムの構築を行っています. |
 |
| 不整地対応型パーソナルモビリティ |
危険作業を可能とする自律移動ロボットの開発人力で作業している危険かつ悪環境の現場での作業を遠隔操作や自動制御を使用して人が安全に作業できるようにする自律移動ロボットの開発を行っています.また,泥地や狭小環境などの環境でも作業可能なロボットを開発しています. |
 |
| 危険作業を行う バキューム作業ロボットの開発 |
重労働作業支援システムの開発労働災害の防止や作業員の負荷軽減を目的とした作業支援システムの開発を行っています.また,重量物を取り扱う際の腰痛発生予防を目的としたウェアラブル型作業支援システムの開発を行っています. |
 |
| 装着型作業支援システムの開発 |
ドライブロボットの開発ロボットが外部環境と接した際の環境認知に関する問題を解決し,災害発生時における人命救助等を目的として,ヒューマノイドロボットによる車両の自動運転制御に関する研究を行っています. |
 |
| ドライブロボットによる 自動運転テスト |
ギター演奏支援装置の開発脳性麻痺などの身体障害を持つ方を対象として,音楽療法によるQOLの向上,合奏によるコミュニケーション手段の獲得を目的としたギター演奏を支援する装置の開発を行っています. |
 |
| 脳性麻痺者を対象とした ギター演奏支援装置の開発 |
自律移動ロボットの開発小型自立移動ロボット「MieC」を用いて,コミュニケーションロボットの開発,画像・音声認識の研究,言語教育ロボットの研究,野外自律走行ロボットを開発しています. |
 |
| 自律移動ロボット「MieC」 |
ドライバーの意図を予測する運転支援システムの開発様々な状況におけるドライバーの自動車運転技術を学習することで運転意図を予測し,ドライバーの運転を支援するシステムや次世代型パーソナルモビリティの開発を行っています. |
 |
| 運転支援システムの開発 |
Copyright (C) 2023 Intelligent Robotics Lab. Mie Univ. All rights reserved.