パラレルメカニズムって何?
パラレルメカニズムとはリンクが並列的に配置され、閉ループ構造をもつ機構です。
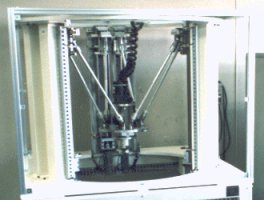
写真は当研究室と三重県工業技術総合研究所金属センターの共同研究で開発された垂直直動型パラレルメカニズムです。
多関節ロボットとの比較
パラレルメカニズムの仲間たち
パラレルメカニズム・シミュレータのダウンロード
研究テーマに戻る
トップに戻る
 写真は当研究室と三重県工業技術総合研究所金属センターの共同研究で開発された垂直直動型パラレルメカニズムです。
写真は当研究室と三重県工業技術総合研究所金属センターの共同研究で開発された垂直直動型パラレルメカニズムです。