|
Research Projects
Wearable Robots (Active Casts)
We develop a wearable robot (active cast) that transmits residual muscle force to the hands for people who have upper limb function disabilities. Apart from daily living assists, it is also expected to have a functional recovery effect. We also develop shoulder, knee, and ankle mounted robots to support rehabilitation and daily life by expanding the scope of our research to include walking support for hemiplegic patients.
|
 |
Support for operating
wheelchair by active cast |
Orthotic to enable real-time diagnostic imaging
We develop orthoses that realizes functional recovery of the locomotor in consideration of the dynamics of the locomotor in real-time for patients with movement disorders by combining wearable ultrasonic devices and 3D printed orthosis.
|
 |
Locomotor analysis
using echo |
Welfare Robots and Nursing Care Systems to Realize Healthy Longevity Society
We develop welfare robots and nursing care systems to support the independence of people with severe disability. We also develop a robotic prosthesis to consider fall prevention, transfer assist robot for the purpose of restoring bodily functions, as well as assistive devices for watching over dementia patients to prevent falls.
|
 |
Robotic prosthesis
to prevent fall |
Wheelchair-Mounted Robot Arm System
We develop electric wheelchair-mounted robot arms which could help the patients with upper limb dysfunction to perform daily activities. We also develop control systems for patients of muscular dystrophy to avoid obstacles by using minute movements of the thumb.
|
 |
Robot arm
for electric wheelchair |
Support system for psychosomatic relaxation
We develop support systems to improve the sense of movement and to psychosomatic relaxation for people with physical disabilities or elderly people. We support activities such as sports, guitar playing, and drawing.
|
 |
 |
Guitar playing support equipment "Kyoraku"
|
Support for creative activities
by drawing support robot |
Human Cooperative Type Assisting Robots
We develop robots that can cooperate with people in medical, welfare and industrial fields. In addition, we develop human-robot coordinated surgical operation assistive systems that incorporate tremor stabilization technology.
|
 |
 |
| Surgical operation support robot |
Liquid handling robot |
Advanced Medical Systems in Cooperation with the university hospital
Under the medical and engineering cooperation system with the Mie University Hospital, we develop advanced medical systems such as designing a delirium prediction model using machine learning and respiratory rehabilitation effect measurement system.
|
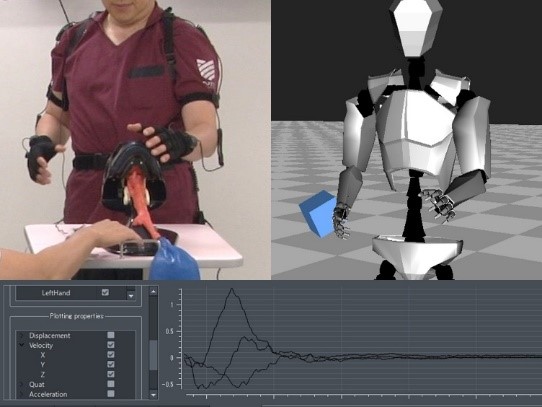 |
Technique analysis
by motion capture |
Automation and Optimization of the Casting Process
We develop optimization systems using computation fluid dynamics (CFD) and study the casting process to realize high-quality, high-functionary and high durability products. We also study shape optimization of molding process.
|
 |
| Optimum shape of die-cast product |
Bio-system for Medical Device
We develop advanced medical systems, such as drug delivery systems that realizes early healing in diseases like arteriosclerosis and infectious, and cell sorters using microfluidic devices.
|
 |
Analysis of microfluidic
for cancer cells |
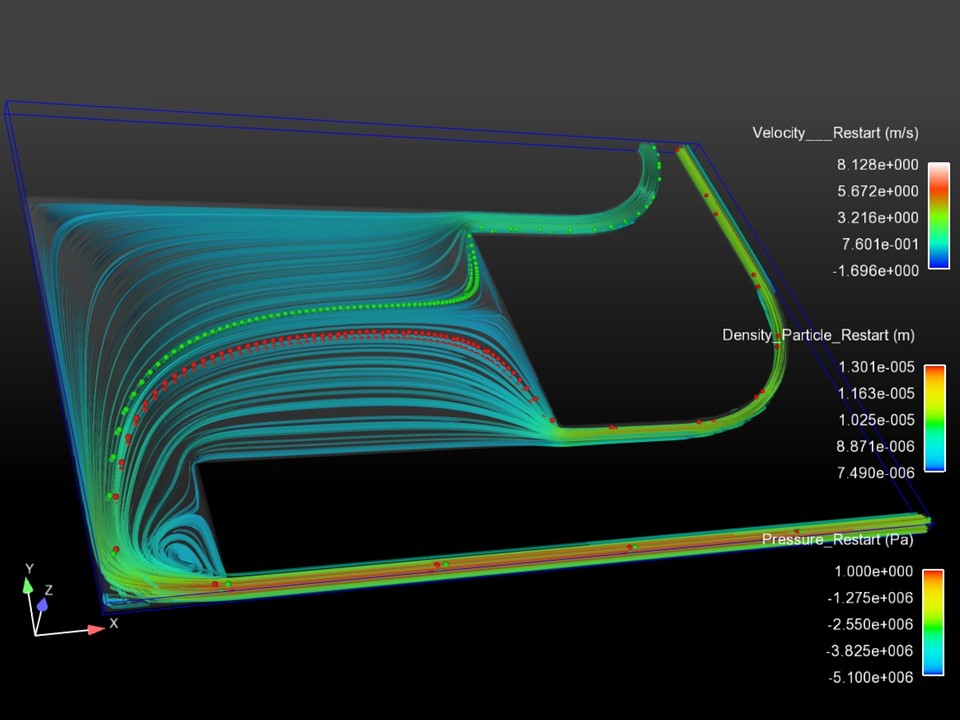
Process Control Systems to Improve Product Quality and Productivity
We analyze thermo-fluid phenomena in medical product manufacturing processes and heat treatment processes, and develop process control systems to improve product quality and productivity. In addition, we develop decarbonization technology for large plants and DX technology for production systems.
|
 |
| Heat treatment control system |
Next Generation Personal Mobility
We develop personal mobility for rough terrain, farm work and light household work alone for the super-aged society. In addition, we design driving stability control systems based on vehicle posture.
|
 |
Personal mobility
for rough terrain |
Autonomous Mobile Robot for Hazardous Work
We develop autonomous mobile robots that enables people to work safely in dangerous and adverse environments using remote control or automatic control. We also develop robots that can work in muddy and narrow environments.
|
 |
| Vacuum work robot for hazardous work |
Hard work support system
We develop work support systems to prevent industrial accidents and reduce the workload of workers. We also develop wearable work support systems to prevent back pain when handling heavy objects.
|
 |
| Wearable work support system |
Drive Robot
In order to solve the recognition problem of external environment of the robot and rescuing human life at the time of disaster occurrence, we conduct researches on operating a humanoid robot to drive a vehicle via automotive control method.
|
 |
Automatic operation test
by drive robot |
Support Device for Playing Guitar
For people with physical disabilities such as cerebral palsy, we develop support devices for playing guitar, which aims to improve QOL by music therapy and acquire communication tool within ensemble.
|
 |
Guitar playing support device
for cerebral palsy |
Autonomous Mobile Robot
We use a small self-contained mobile robot "MieC" to develop communication robots. We also do researches on image and speech recognitions, language education and outdoor independent autonomous mobile robots.
|
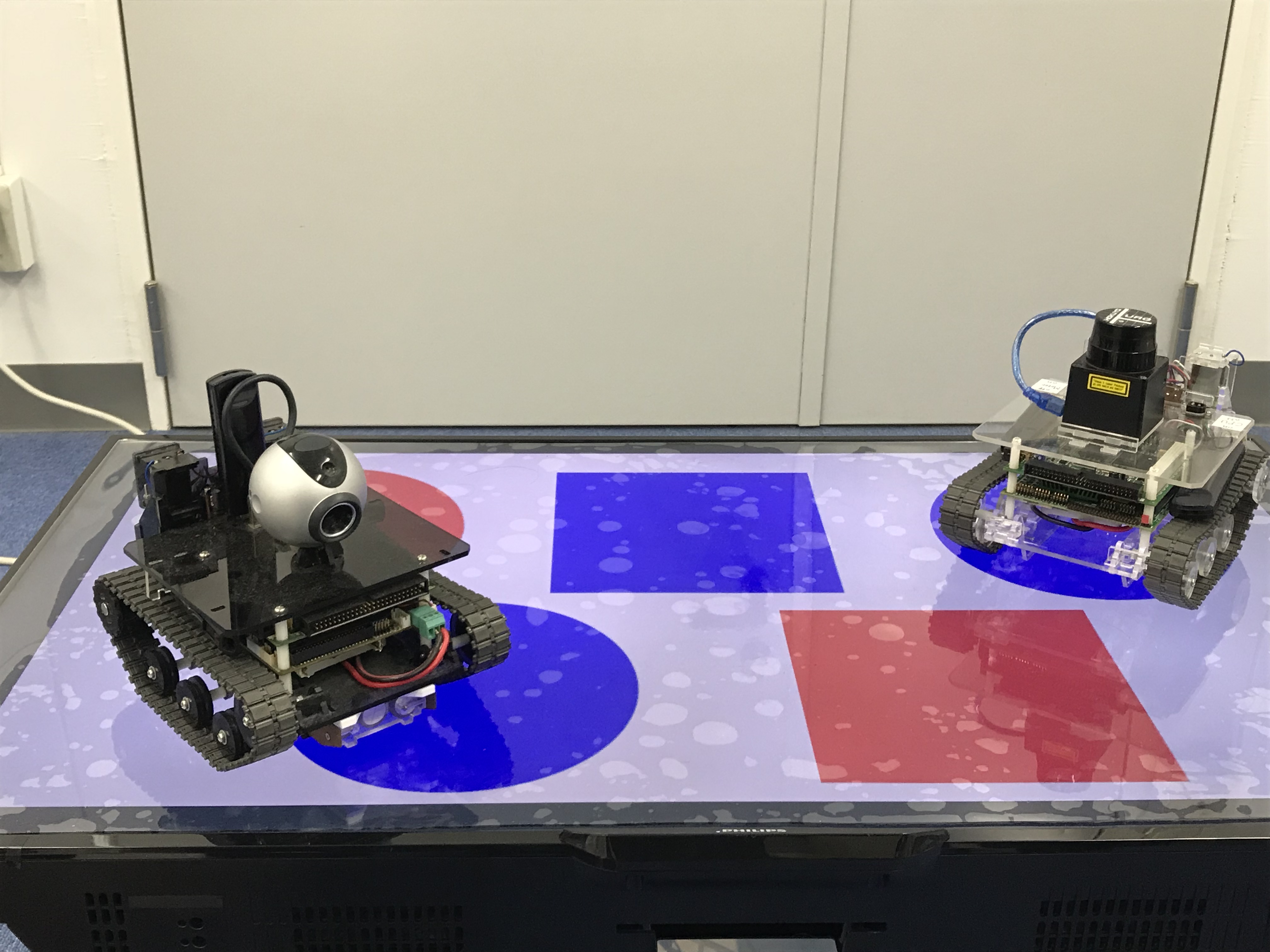 |
Self-supporting mobile robot
"MieC" |
Driving Support Systems to Predict Driverfs Intentions
We develop driving support systems which predict driverfs intentions by learning driving techniques in various situations and next generation personal motilities.
|
 |
| Driving support systems |
|






